Swing Catalyst Motion Capture Indstillinger
Introduktion
Denne artikel beskriver, hvordan man opsætter og konfigurerer Bevægelsesfangst-funktionaliteten i Swing Catalyst. Denne funktion er muligvis ikke tilgængelig for alle licenstyper – se venligst vores MoCap FAQ for mere information.
Krav
- Komponenter skal installeres i komponentmappen.
Din computer skal opfylde vores anbefalinger til PC-specifikationer, og vigtigst af alt skal grafikkortet leve op til vores anbefalinger.
Konfiguration
MoCap-indstillingerne findes i hovedmenuen under Indstillinger i sektionen “Video & Indfangelse”. Herfra kan du vælge eller ændre udbyderen af eksekveringen samt batchstørrelsen.
Vi anbefaler en batchstørrelse mellem 12 og 24 afhængigt af, hvor mange aktive/aktiverede kameraer du har.
Anbefalet udførelsesudbyder
NVIDIA
NVIDIA RTX 3060 eller nyere GPU -> TensorRT
Hvis TensorRT ikke virker, prøv CUDA
Andre grafikkort
- DirectML
Standarden er DirectML, da det er den mest kompatible udbyder. Det er desværre også den langsomste.
Under benchmark-testning har vi fundet, at TensorRT er den mest præstationsdygtige af udbyderne.
TensorRT er i gennemsnit (35-45% hurtigere end DirectML, 20-25% hurtigere end CUDA)
CUDA giver moderate forbedringer i forhold til DirectML (i gennemsnit 10-12%)
CUDA bruger betydeligt mere GPU-hukommelse (VRAM) end TensorRT – prøv at reducere batchstørrelsen, hvis du bruger CUDA
Komponentdownload
Hvis du vælger en komponent, der ikke allerede er installeret, bliver du bedt om at downloade den.
For at bruge TensorRT eller CUDA skal du først downloade komponenterne.
note: Denne funktion er kun tilgængelig i version 25.2.
Anbefalet batchstørrelse
Ifølge vores testning giver større batchstørrelser bedre præstation. Vi anbefaler en batchstørrelse mellem 16 og 24 til en typisk opsætning med 2-3 kameraer. Hvis du bruger andet software samtidig, som kræver grafikressourcer, kan det være en fordel at prøve en lavere batchstørrelse. Den optimale batchstørrelse afhænger i sidste ende af din arbejdsgang og hvilke programmer du kører ved siden af Swing Catalyst.
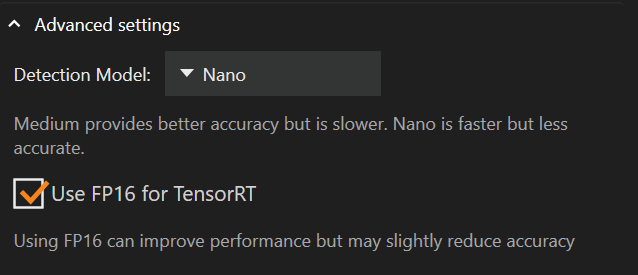
Avancerede indstillinger
Under indstillingerne for udførelsesudbyder finder du de avancerede indstillinger, hvor du kan ændre detektionsmodellen eller aktivere “FP16”.
At ændre detektionsmodellen fra Medium til Nano kan reducere mængden af hukommelse, dit grafikkort bruger, og forbedre præstationen – på bekostning af nøjagtighed.
Hvis du har svært ved at opnå en ordentlig detektion, kan du prøve at skifte modellen til Medium, genstarte Swing Catalyst og prøve igen.
Standarddetektionsmodellen er Nano
“FP16 til TensorRT” er som standard ikke markeret
FP16
Brug af FP16 kan reducere hukommelsesforbruget og forbedre præstationen (på bekostning af nøjagtighed).
Under testning har vi fundet, at FP16 kan forbedre præstationen med 20-35%.
Det kan også give mere inkonsistente resultater mellem optagelser sammenlignet med standard FP32. Det kan være værd at prøve, hvis du oplever præstationsproblemer, eller hvis du løber tør for hukommelse.
Præstationssammenligninger
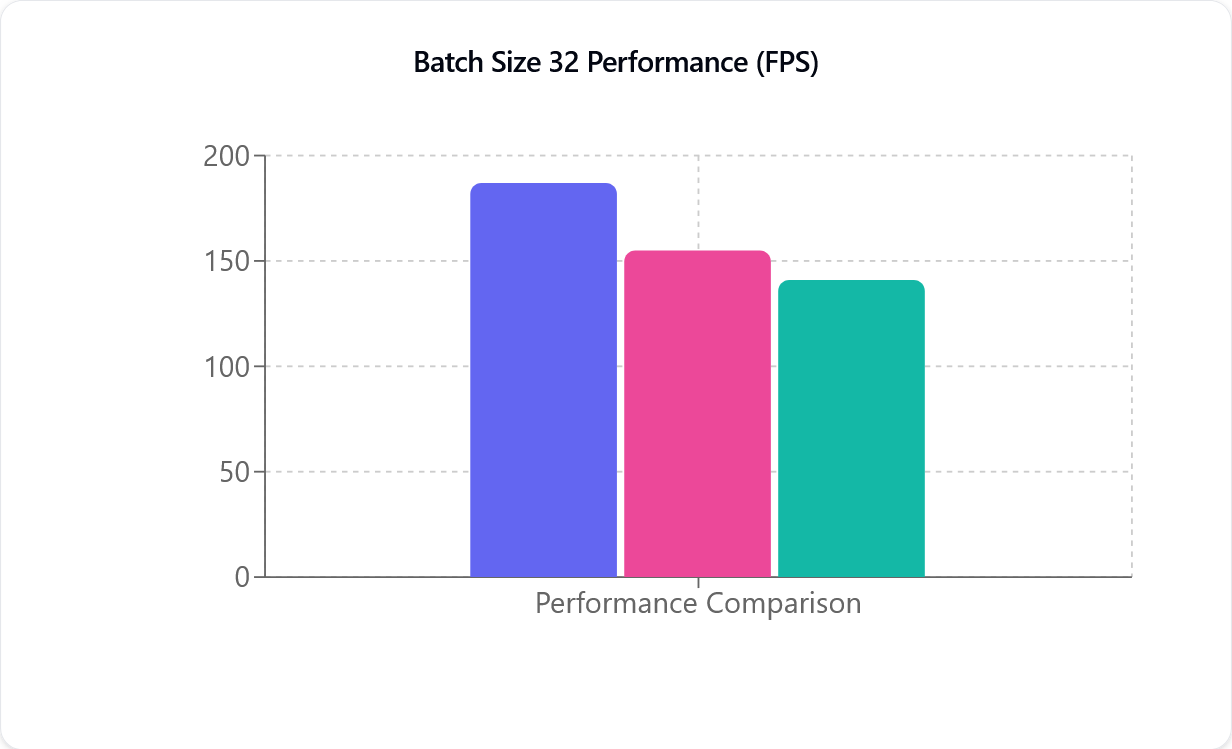
TensorRT (lilla), CUDA (lyserød) og DirectML (grøn), fra venstre mod højre. Y-aksen (FPS) angiver, hvor mange billeder pr. sekund bevægelsesfangst-modellen er i stand til at behandle, og er ikke direkte relateret til dit kameraets billedfrekvens.
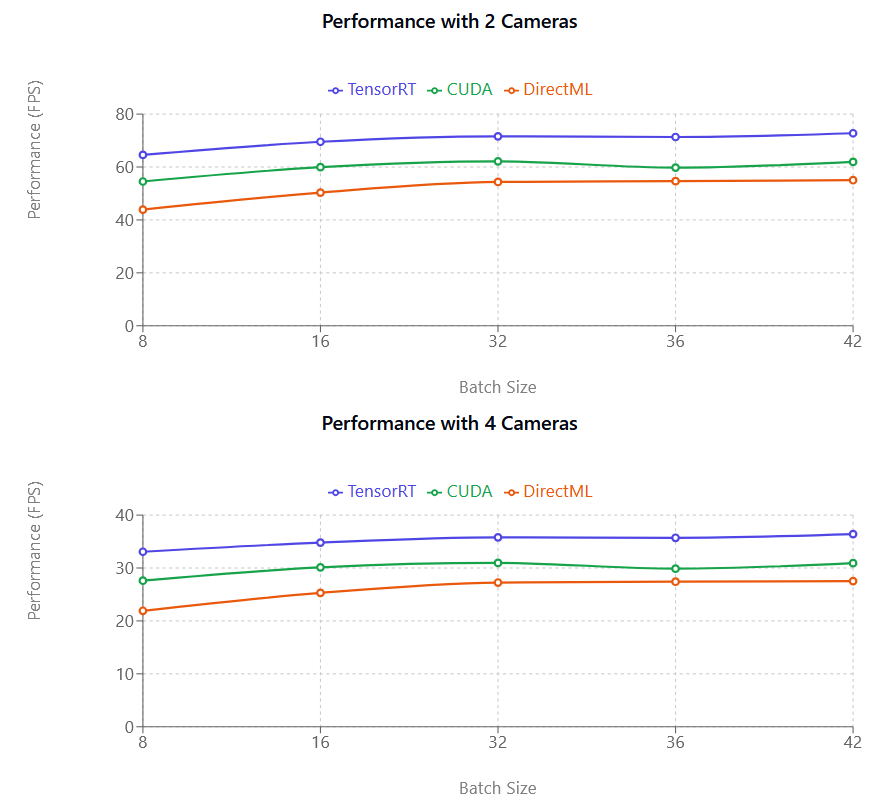
Præstationsmetrikken (FPS) angiver, hvor mange billeder der behandles pr. sekund – jo højere tal, jo hurtigere behandling. Som det fremgår af ovenstående illustration er både CUDA og TensorRT næsten lineære. Går du f.eks. fra ét til to kameraer, ser du næsten en halvering af præstationen. Dette præstationstab er mindre mærkbart med nyere NVIDIA grafikkort.
Sidst opdateret: 2025-05-16 | Se på den officielle supportside