Εγκατάσταση και Ρύθμιση του Dual Motion Plate
Για πιο αναλυτικό υλικό εγκατάστασης, δείτε τα συνημμένα αρχεία pdf.
Εγκατάσταση
Για πληροφορίες φυσικής εγκατάστασης, ανατρέξτε στο συνημμένο PDF οδηγού εγκατάστασης.
Δείτε το PDF Οδηγός Εγκατάστασης για την προετοιμασία του χώρου σας για την εγκατάσταση.
Δείτε το PDF Οδηγός Εκκίνησης για τη ρύθμιση του Motion Plate για χρήση.
Απαιτήσεις:
Το λογισμικό εγκαθιστά αυτόματα τους ντράιβερ για την Πλάκα Δύναμης και τις Pressure Plates (εκτός από το αρχείο Βαθμονόμησης). Η χειροκίνητη εγκατάστασή τους δεν θα πρέπει να είναι απαραίτητη.
Εγκατεστημένος ντράιβερ Bertec CDM .
Εγκατεστημένος ντράιβερ MeasureX . Κάντε κλικ για λεπτομέρειες εγκατάστασης
- Υλικό Dual Motion Plate.
Εφαρμόζεται σε:
- MotionCatalyst & SwingCatalyst.
Επιπλέον του οδηγού εκκίνησης, εξοικειωθείτε με τον παρακάτω έλεγχο Βαθμονόμησης.
Σύνδεση της πλάκας
Με ένα setup Διπλής Πλάκας υπάρχουν συνολικά 4 καλώδια. Σε πολλές περιπτώσεις μπορεί να είναι χρήσιμο να χρησιμοποιήσετε έναν τροφοδοτούμενο USB hub για τη σύνδεση των συσκευών, ώστε να μην χρησιμοποιούνται όλες οι διαθέσιμες θύρες USB του υπολογιστή.
Διαδικασία σύνδεσης
Συνδέστε τα δύο καλώδια USB Mini B στις δύο Πλάκες Ισορροπίας.
Συνδέστε τα δύο USB-B (μεγαλύτερο βύσμα από το USB Mini B) στις Force Plates.
Συνδέστε 4 καλώδια από τις πλάκες στον υπολογιστή.
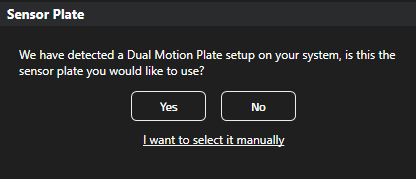
Εάν η διαμόρφωση της πλάκας δεν εντοπιστεί αυτόματα, δοκιμάστε να αποσυνδέσετε και να επανασυνδέσετε μερικά από τα καλώδια και επανεκκινήστε το λογισμικό.
Κάντε κλικ στο “Yes” για να συνεχίσετε.
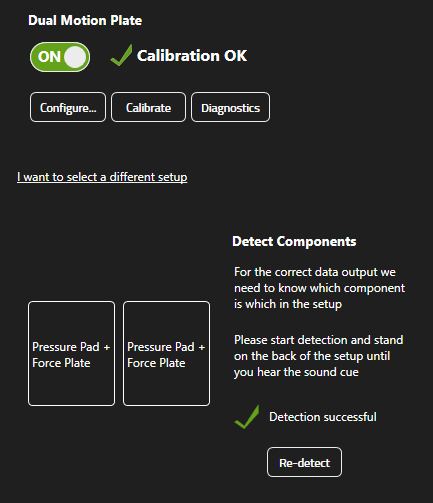
Τώρα που το λογισμικό έχει εντοπίσει επιτυχώς όλες τις πλάκες που αποτελούν ένα Dual Motion Plate, ήρθε η ώρα να βαθμονομήσετε την πλάκα.
Βεβαιωθείτε ότι κανείς δεν στέκεται στην πλάκα και ότι οι πλάκες είναι ελεύθερες από τυχόν γρασίδι ή εξοπλισμό που τις περιβάλλει.
Κάντε κλικ στο “Calibrate”
Αυτό θα μηδενίσει την Πλάκα Δύναμης. Εάν η Βαθμονόμηση αποτύχει, ανατρέξτε στην ενότητα αντιμετώπισης προβλημάτων .
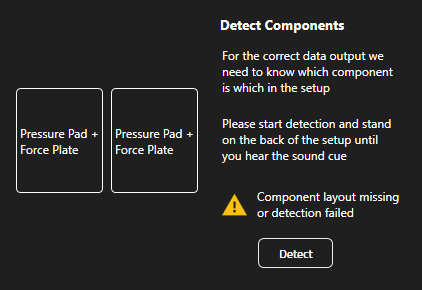
Εντοπισμός συστατικών
Προκειμένου να γνωρίζετε ποια πλάκα βρίσκεται μπροστά ή στα δεξιά, θα πρέπει να εκτελέσετε αυτή τη διαδικασία.
Κάντε κλικ στο “Detect” και ακολουθήστε τις οδηγίες που εμφανίζονται στην οθόνη.
Έλεγχος Βαθμονόμησης
Υπάρχουν δύο τύποι Βαθμονόμησης:
Το μηδενικό επίπεδο για την Πλάκα Δύναμης.
Το αρχείο Βαθμονόμησης για την πλάκα Πίεσης / Ισορροπίας.
Αυτός ο έλεγχος αφορά συγκεκριμένα το τμήμα Πλάκας Δύναμης του Motion Plate για να επαληθεύσετε ότι είναι σωστά εγκατεστημένο.
Είναι σημαντικό να διασφαλίσετε καλή Βαθμονόμηση για ακριβή δεδομένα. Συνιστούμε να βαθμονομείτε και να ελέγχετε τη Βαθμονόμηση πριν από κάθε Συνεδρία μιας σειράς Εγγραφών.
Κάντε κλικ στο κουμπί “Calibrate” στο μενού ρυθμίσεων - Hardware - Sensor Plate
Κάντε κλικ στο κουμπί “Configure” δίπλα του, στη συνέχεια κάντε κλικ στο κουμπί “Play” για προεπισκόπηση ζωντανών δεδομένων Δύναμης και Πίεσης
Χρησιμοποιήστε το Κοντάρι Ρακέτας ή τη Φτέρνα σας για να ασκήσετε Πίεση σε μία από τις Γωνίες της πλάκας, στη συνέχεια επαληθεύστε ότι τα Δεδομένα Πίεσης (έγχρωμος θερμικός χάρτης) ευθυγραμμίζονται με τα Δεδομένα Δύναμης (κύκλος συνολικού CoP).
Εάν δεν ευθυγραμμίζονται, μπορεί να χρειαστεί να περιστραφεί μία ή περισσότερες πλάκες, δείτε “Πώς να αλλάξετε την Περιστροφή ”.
Ξεκινήστε μια Συνεδρία, στη συνέχεια καταγράψτε μια Εγγραφή χωρίς κανέναν στην πλάκα. Ανοίξτε την Εγγραφή και επαληθεύστε ότι οι ενδείξεις δύναμης είναι εντός 10 Newton από το μηδέν.
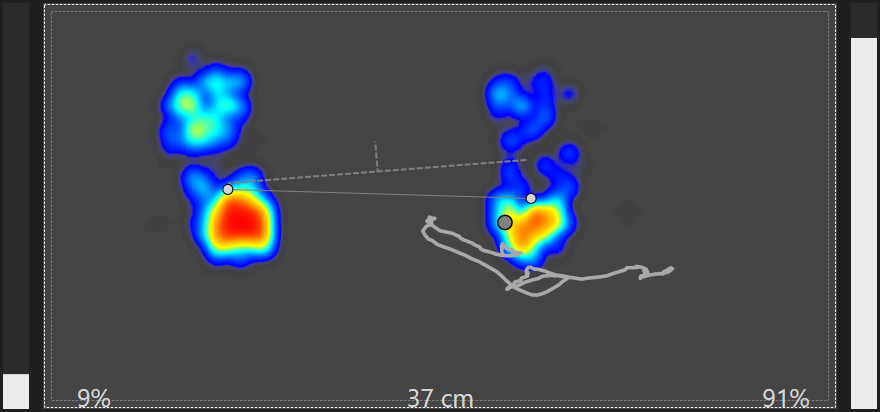
Παράδειγμα ευθυγράμμισης της κουκκίδας Πίεσης με την κουκκίδα Κέντρου Πίεσης:
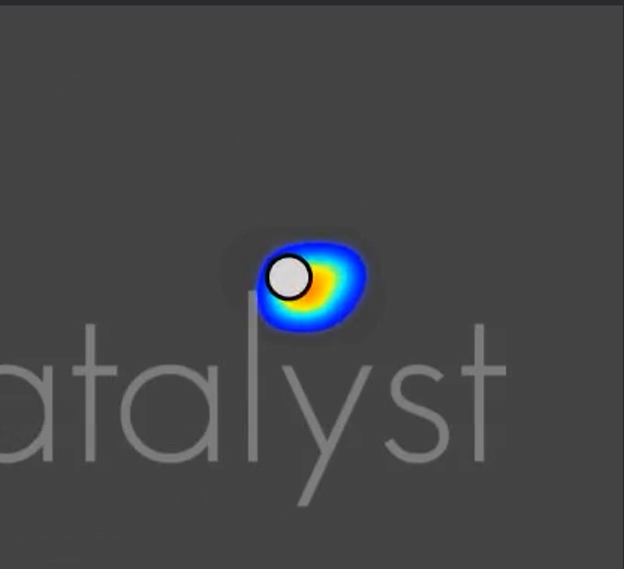
Θέλουμε τα Δεδομένα Πίεσης / Δεδομένα Στάσης να διαβάζονται από το Δάκτυλο Ποδιού προς τη Φτέρνα. Για να γίνει αυτό, τα Δεδομένα Πίεσης πρέπει να περιστραφούν 180 μοίρες, ώστε το αριστερό Πόδι να εμφανίζεται στην αριστερή πλάκα (όπου βρίσκεται το τμήμα “swing” του λογοτύπου SwingCatalyst) και το δεξί Πόδι να εμφανίζεται στη δεξιά πλάκα.
Αντιμετώπιση προβλημάτων
Τα Δεδομένα Πίεσης και Δύναμης δεν ευθυγραμμίζονται, ή η Βαθμονόμηση αποτυγχάνει
Εάν η κουκκίδα CoP δεν ταιριάζει με την κουκκίδα Πίεσης, η πλάκα πιθανώς δεν είναι οριζόντια ή κάτι την πιέζει και εμποδίζει την ελεύθερη κίνησή της.
Κάντε κλικ ξανά στο “Calibrate” και επαναλάβετε τον έλεγχο Βαθμονόμησης
Εάν εξακολουθεί να παρεκκλίνει, ρυθμίστε εκ νέου το ποδαράκι οριζόντωσης της Πλάκας Δύναμης ενώ πιέζετε προς τα κάτω στη διαγώνια γωνία: πρώτα μικρύνετέ το και στη συνέχεια επεκτείνετέ το μέχρι το σημείο που αγγίζει το πάτωμα και αισθάνεστε ελαφριά αντίσταση
Επιβεβαιώστε ότι και τα τέσσερα ποδαράκια είναι σε σταθερή επαφή με το πάτωμα πιέζοντας προς τα κάτω στις γωνίες
Βεβαιωθείτε ότι δεν υπάρχει γρασίδι ή παρόμοιο υλικό που να πιέζει την πλάκα
Επαναλάβετε τον έλεγχο Βαθμονόμησης
Παρακάτω παρουσιάζονται παραδείγματα διαμορφώσεων που είναι λανθασμένες· ελπίζουμε ότι αυτά θα βοηθήσουν στην κατανόηση και αντιμετώπιση τέτοιου είδους προβλημάτων.
Τα Δεδομένα Πίεσης / αποτύπωμα ποδιού λείπουν από μία πλάκα
Ελέγξτε τις συνδέσεις σε κάθε Pressure Plate, δοκιμάστε να αποσυνδέσετε και να επανασυνδέσετε τις πλάκες.
Επανεκκινήστε το λογισμικό.
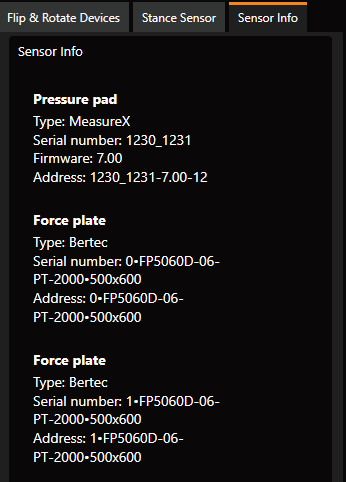
Επαληθεύστε ότι το SwingCatalyst αναγνωρίζει και τις δύο πλάκες. Στις “Hardware Settings” -> “Configure” -> “Sensor Info”, θα πρέπει να υπάρχουν δύο σειριακοί αριθμοί, π.χ.: 1230_1231. Εάν εμφανίζεται μόνο ένας αριθμός, είναι πιθανό η δεύτερη πλάκα να μην αναγνωρίζεται από το SwingCatalyst.
Ελέγξτε τη Διαχείριση Συσκευών των Windows. Θα πρέπει να υπάρχουν δύο καταχωρήσεις στην ενότητα “Ports & COM” με την ονομασία “MeasureX Pressure Controller”. Εάν δεν τις βλέπετε, αυτό μπορεί να υποδηλώνει πρόβλημα φυσικής σύνδεσης.
Παραδείγματα λανθασμένης διαμόρφωσης
Τα Δεδομένα Πίεσης είναι ανάποδα

Μια τέτοια διαμόρφωση μπορεί να εντοπιστεί στεκόμενοι στις πλάκες και γέρνοντας προς τα εμπρός ή προς τα πίσω.
Εάν η κίνηση του CoP είναι αντίθετη από την Πίεση, αυτό σημαίνει ότι είτε η Δύναμη είτε η Πίεση χρειάζεται να περιστραφεί 180 μοίρες.
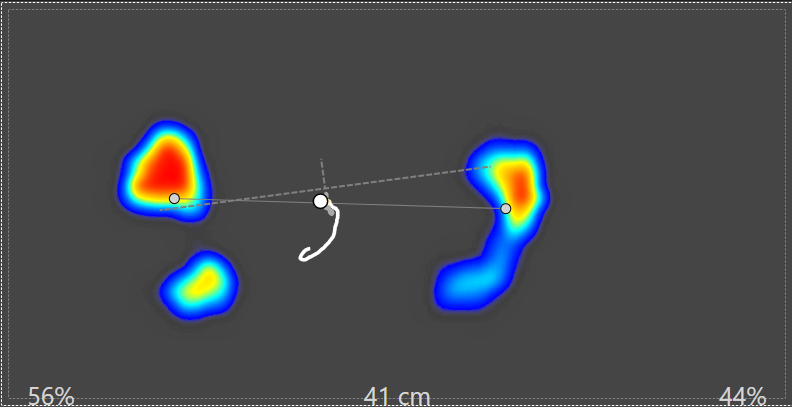
Η Πίεση είναι ανάποδα και η Δύναμη έχει λανθασμένη Περιστροφή

Ακολουθώντας τη λογική που περιγράφεται στον παραπάνω έλεγχο Βαθμονόμησης, σε αυτό το παράδειγμα υπάρχουν αρκετά λάθη:
Το αποτύπωμα ποδιού (Δεδομένα Πίεσης, αναφέρεται επίσης ως Δεδομένα Στάσης στις Ρυθμίσεις SwingCatalyst) είναι “ανάποδα”.
Η κουκκίδα CoP (η λευκή κουκκίδα δίπλα στο “S” στο λογότυπο “SwingCatalyst” στο παρασκήνιο) δεν ευθυγραμμίζεται με το αποτύπωμα ποδιού.
Η κουκκίδα CoP δεν εμφανίζεται στην ίδια πλάκα με το αποτύπωμα ποδιού.
Για να διορθωθεί αυτό, πρέπει πρώτα να περιστρέψουμε τα Δεδομένα Πίεσης / Στάσης ώστε το αριστερό Πόδι να εμφανίζεται στα αριστερά, και στη συνέχεια να περιστρέψουμε τα Δεδομένα Δύναμης έως ότου ταιριάξουν με το αποτύπωμα ποδιού.
Για τις Διπλές Πλάκες είναι σημαντικό να εφαρμόζετε τη λογική του ελέγχου Βαθμονόμησης σε κάθε μεμονωμένη πλάκα.
Πατήθηκε η λανθασμένη πλάκα κατά τη Φάση εντοπισμού Διπλής Πλάκας
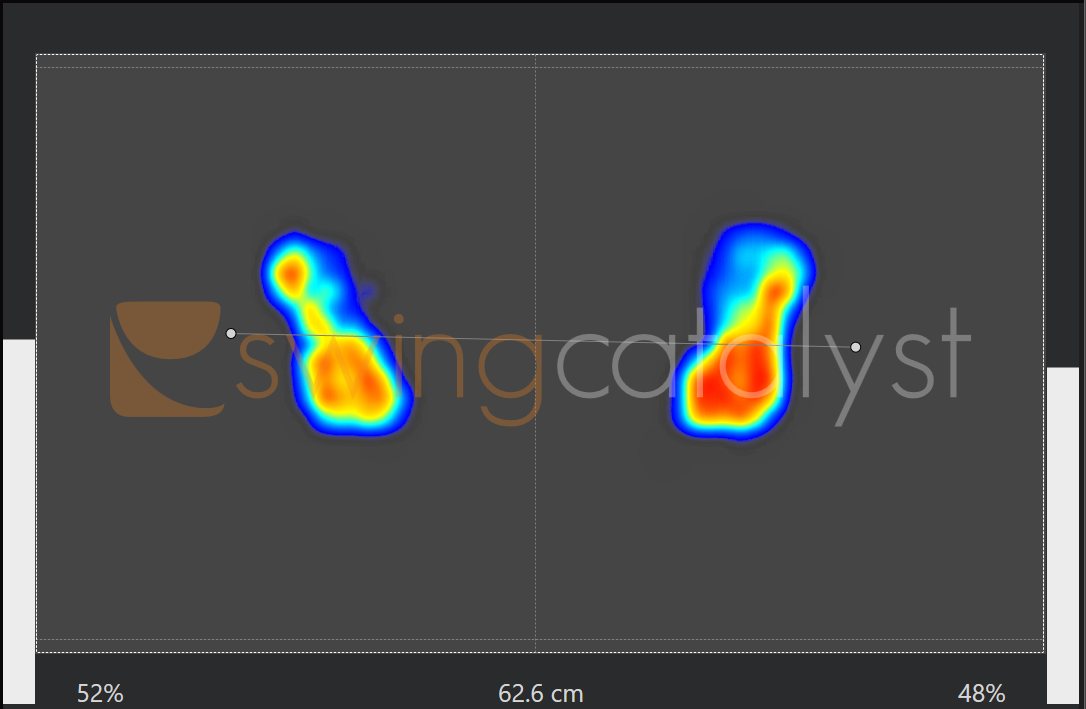
Σε αυτό το παράδειγμα, πατήθηκε η λανθασμένη πλάκα κατά τη Φάση “εντοπισμού συστατικών”. Όταν συμβαίνει αυτό, μπορείτε να δείτε ότι τα Δεδομένα Πίεσης και Δύναμης δεν ευθυγραμμίζονται σωστά, και σε αυτή την περίπτωση η κουκκίδα/οι κουκκίδες CoP βρίσκονται εκτός των αποτυπωμάτων ποδιών, κάτι που κανονικά δεν θα έπρεπε να συμβαίνει.
Για να το διορθώσετε, δοκιμάστε να κάνετε κλικ στο “detect components” ξανά, αλλά πατήστε τη δεξιά πλάκα / την πίσω πλάκα. Αφού το κάνετε αυτό, τα δεδομένα θα πρέπει να αλλάξουν ώστε να μοιάζουν περισσότερο με το στιγμιότυπο οθόνης παρακάτω.
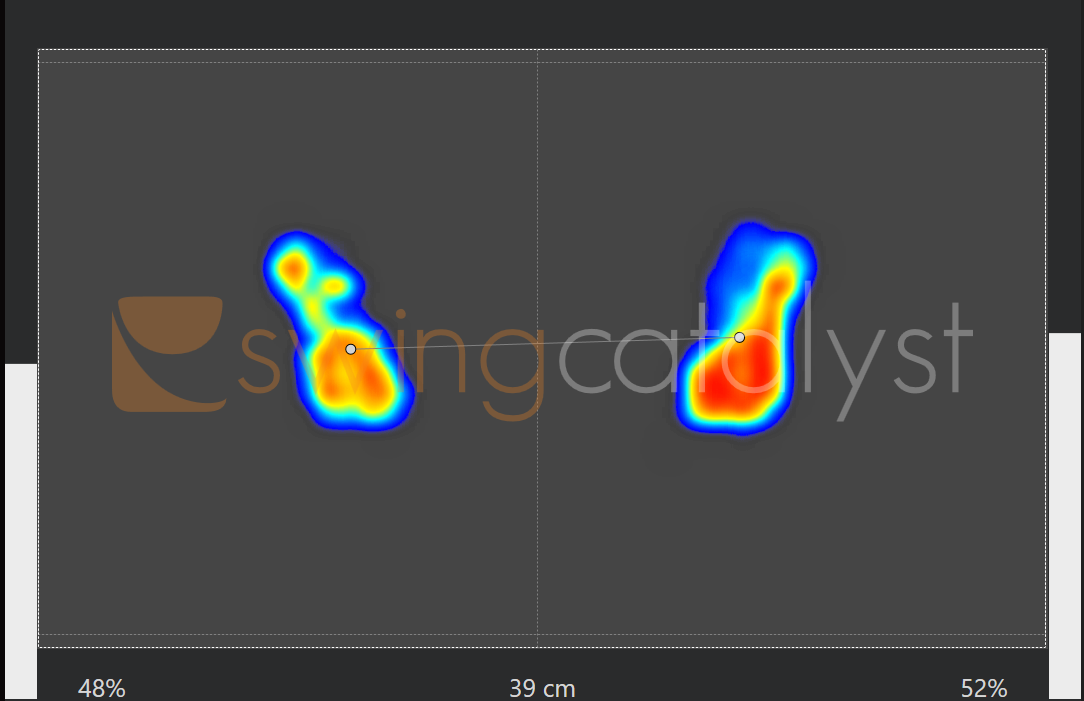
Εδώ είναι τα ίδια δεδομένα με παραπάνω, αλλά με την σωστά εντοπισμένη πλάκα:
Τα Δεδομένα Πίεσης φαίνονται σωστά αλλά το CoP είναι λανθασμένο
Αυτό είναι ένα παράδειγμα από ένα Single Motion Plate όπου η Περιστροφή των Δεδομένων Δύναμης είναι λανθασμένη κατά 180 μοίρες.
Μπορείτε να το παρατηρήσετε από το γεγονός ότι τα Δεδομένα Πίεσης έχουν τον σωστό προσανατολισμό (οι Φτέρνες βρίσκονται προς τα κάτω στο κάτω μέρος της οθόνης).
Για να διορθώσετε τέτοιου είδους προβλήματα, ανατρέξτε στον παραπάνω έλεγχο Βαθμονόμησης και ακολουθήστε τη διαδικασία· για τις Διπλές Πλάκες πρέπει να γίνει για κάθε πλάκα ξεχωριστά.
Πώς να αλλάξετε την Περιστροφή
Αντί να περιστρέφετε φυσικά τις πλάκες, είναι δυνατό να το κάνετε αυτό μέσω λογισμικού.
Για να περιστρέψετε μια Πλάκα Αισθητήρα μεταβείτε στις Settings -> Hardware και κάντε κλικ στο Configure.
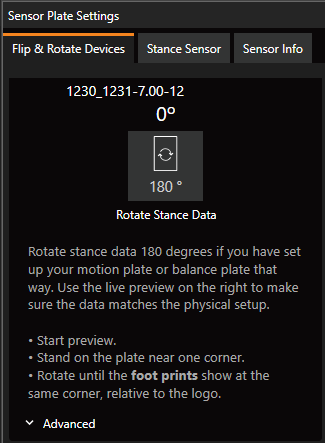
Στις Sensor Plate Settings, βεβαιωθείτε ότι έχει επιλεγεί η καρτέλα “Flip & Rotate Devices”.
Για να περιστρέψετε τα Δεδομένα Πίεσης κάντε κλικ στο “Rotate Stance Data”.
Για να περιστρέψετε τα Δεδομένα Δύναμης κάντε κλικ στο “Rotate Force Data”.
Δείτε μερικές από τις παρακάτω εικόνες αντιμετώπισης προβλημάτων, καθώς απεικονίζουν μια λανθασμένη διαμόρφωση.
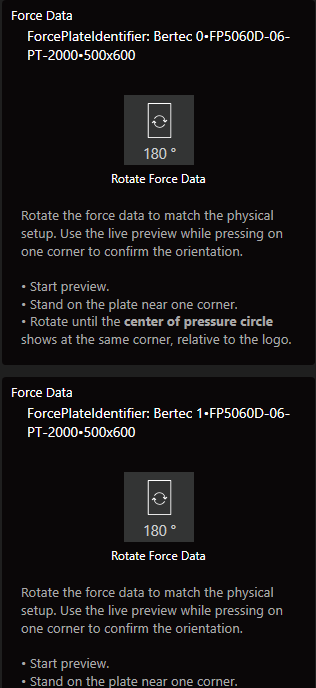
Για setups Διπλών Πλακών θα πρέπει να βλέπετε δύο καταχωρήσεις Δεδομένων Δύναμης στη λίστα, οπότε βεβαιωθείτε ότι περιστρέφετε και τις δύο Force Plates μέσω λογισμικού.
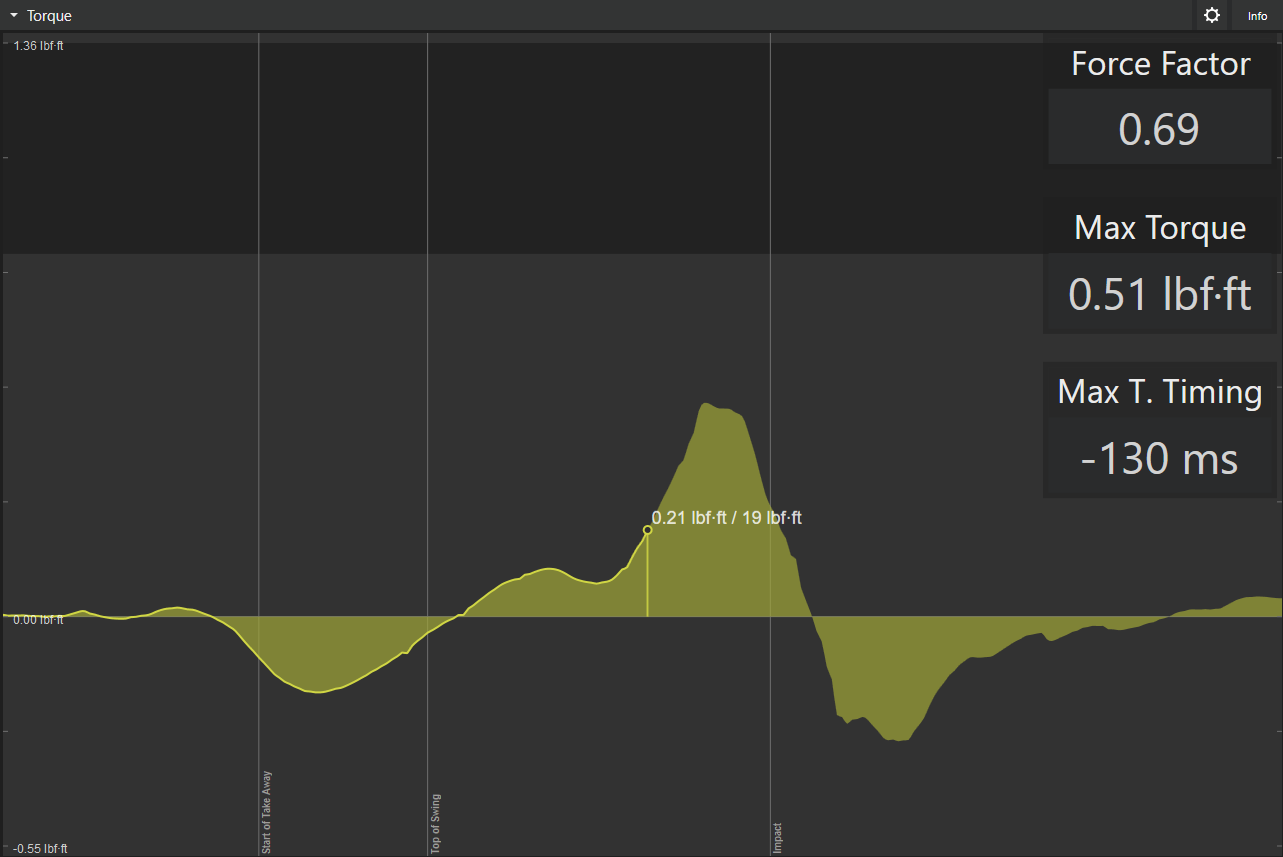
Καλά δεδομένα έναντι κακών δεδομένων
Αυτό είναι ένα παράδειγμα καλών δεδομένων· υπάρχει πολύ μικρός θόρυβος στα δεδομένα ή καμία ένδειξη ότι κάτι εμποδίζει την κίνηση της πλάκας.
Εάν έχετε θορυβώδη δεδομένα ή πολύ χαμηλές ενδείξεις στα γραφήματα, αυτό
Παράδειγμα κακής μηδενικής ρύθμισης εδώ:
Ο θόρυβος από τροφοδοτικά ή κακή γείωση μπορεί επίσης να προκαλέσει θόρυβο παρόμοιο με αυτόν που φαίνεται παραπάνω. Για περισσότερες λεπτομέρειες, δείτε: force-plate-troubleshooting.md
Συνημμένα
Τελευταία ενημέρωση: 2024-03-05 | Προβολή στον επίσημο ιστότοπο υποστήριξης