Kuidas kasutada Jõu vektoreid
Sissejuhatus
See artikkel tutvustab uut jõu vektorite funktsiooni Swing Catalyst 10.0-s. Jõu vektorid on saadaval neile, kellel on Motion Plates (kahekordne või üksik) või jõuplaat (kahekordne või üksik).
Jõu vektorid kuvatakse reaalajas video peal, kui voogedastatakse videot või tehakse Hõivet, ning on nähtavad ka Taasesituse ajal.
Kujutades maareaktsiooni jõude vektoritena (nooltena), mis renderdatakse video pildi peale, loodame muuta liikumise mõistmise lihtsamaks.
Toetatud riistvara:
Dual Motion Plate
Motion Plate 6 ja 5.
Kahekordne jõuplaat.
Üksik Force Plates
Märkus: Jõu vektoritega salvestiste vaatamine on võimalik igas SwingCatalyst tarkvaras ilma täiendava riistvarata.
Jõu vektorid – Sissejuhatus
Jõu vektorid näitavad maareaktsiooni jõude video pildi peal, nii reaalajas Hõive režiimis kui ka Taasesituse ajal. Iga videopildi (kaameranurga) paremas alanurgas on graafik, mis näitab vektorite Koordinaate 3D ruumis.
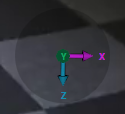
Koordinaatide kuvamine erineb sõltuvalt kaameranurgast.
Koordinaatide graafik näitab, et Z-telg on Vertikaalne ning Y ja X on Horisontaalsed, kasutades samu värve nagu meie jõugraafikud.

Jõu vektorite Suurus vastab täpselt reaalmaailmale, mis tähendab, et (õige kalibreerimise korral) ühe meetri kõrgune vektor võrdub 1000 Newtoniga.
Jõu vektorid – Kalibreerimine
Jõu vektorite kasutamiseks on vajalik Kalibreerimine, et tuvastada, kus plaat videopildis asub. Kalibreerimist tuleb teha vaid üks kord iga kaameranurga kohta. Kui kaamera(d) või plaat(ded) muudavad füüsilist asukohta, on vajalik uus kalibreerimine.
Pange tähele, et vanade salvestiste puhul on vaja kalibreerida iga salvestis eraldi – see ei kehti tagasiulatuvalt, kuna meil pole võimalik teada, kus plaat videopildis asub. Oluline on teha kalibreerimine Hõive režiimis, et see salvestataks automaatselt iga uue salvestisega.
Versioonis 10.2 ja uuemates leiate jõu vektorite kalibreerimise menüü “Data Visuals” alt.
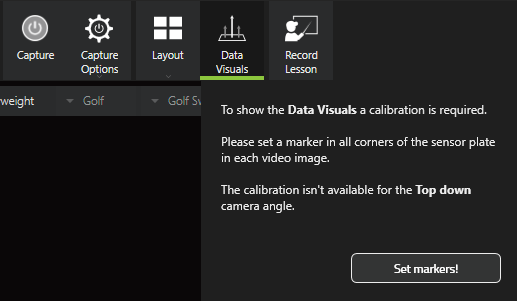
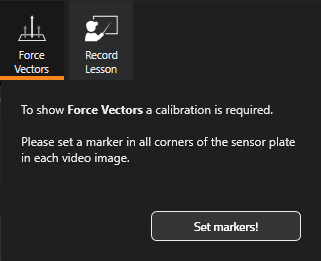
Kalibreerimisprotsessi alustamiseks klõpsake “Set markers!”.
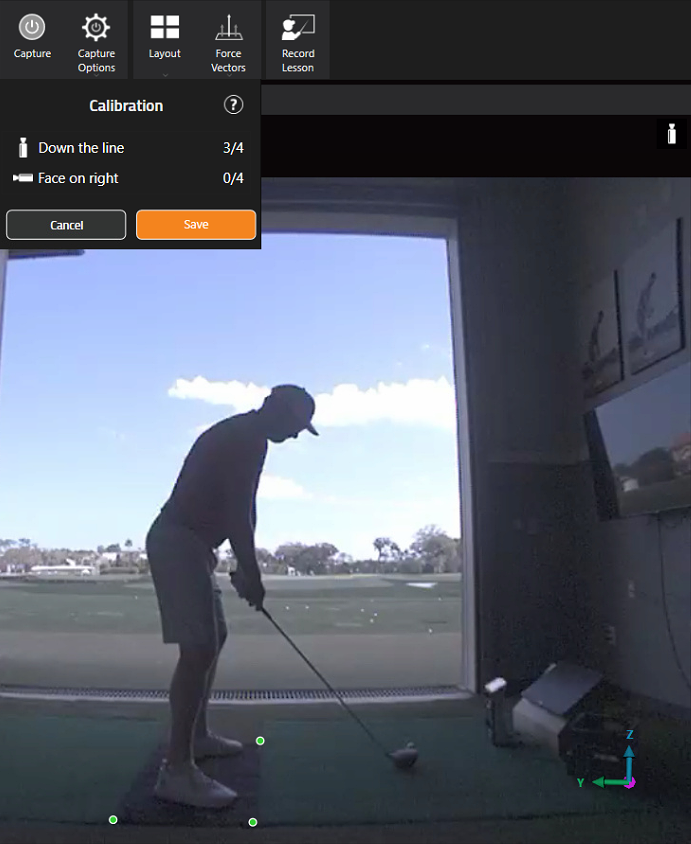
Markerite seadistamiseks klõpsake igal plaadi nurgal. Kahekordse plaadi puhul klõpsake mõlema plaadi kahel välimisel nurgal.
Korrake protsessi teiste kaameranurkade puhul.
Kui teete vea, jätke see tähelepanuta, lõpetage praeguse nurga protsess ja alustage uuesti, klõpsates mõnel nurgal.
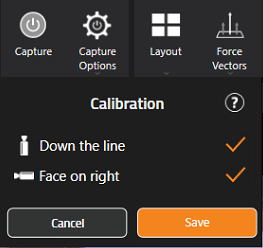
Kui olete valmis, klõpsake “Save”.
Jõu vektorid – Valikud
Sellest rippmenüüst pääsete ligi kõikidele jõu vektoritega seotud valikutele.
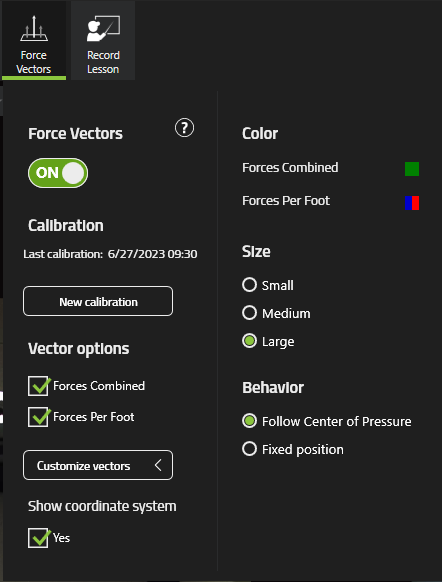
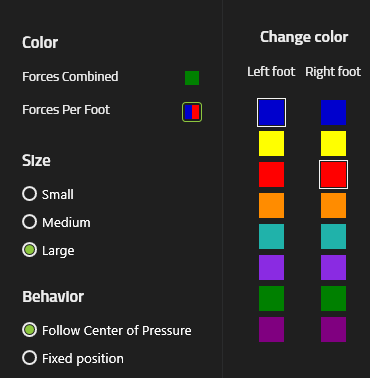
Värvi muutmiseks klõpsake värvi “ikoonil”.
Erinevate värvide valimise illustratsioon:
Tõrkeotsing
Jõu vektorid lähtuvad samast kohast, kuigi kalibreerimine on õige ja mul on kahekordne jõu-/Motion Plate seadistus.
Kui kaameranurk on vale, võib see olla põhjuseks.
Kujutage ette, et vaatate allolevat pilti X-noole suunas (vt lilla noolt pildi paremas alanurgas).
Kõik jõu vektorid renderdatakse samal sügavusel. Küljelt vaadates näib, et need lähtuvad ühest kohast.
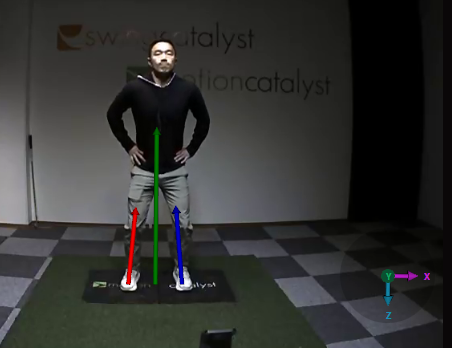
Pange tähele, et juba loodud salvestiste puhul ei ole võimalik kaameranurka muuta. Oluline on veenduda, et see on õige enne salvestamist.
Viimati uuendatud: 2023-12-19 | Vaata ametlikul toetuslehel