Voimavektoreiden käyttö
Johdanto
Tässä artikkelissa esitellään SwingCatalyst 10.0:n uusi voimavektoriominaisuus. Voimavektorit ovat käytettävissä niille, joilla on Motion Plates (kaksois- tai yksittäinen) tai Force Plates (kaksois- tai yksittäinen).
Voimavektorit näkyvät reaaliajassa videokuvan päällä videon suoratoiston tai sieppauksen aikana, ja ne näkyvät myös toiston aikana.
Esittämällä maan reaktiovoimat vektoreina (nuolina), jotka renderöidään videokuvan päälle, pyrimme helpottamaan liikkeen ymmärtämistä.
Tuettu laitteisto:
Dual Motion Plate
Motion Plate 6 ja 5.
Kaksois-voimaanturit.
Yksittäiset Force Plates
Huomio: Voimavektoreilla varustettuja nauhoituksia on mahdollista katsella millä tahansa SwingCatalyst-ohjelmistolla ilman lisälaitteistoa.
Voimavektorit – Johdanto
Voimavektorit näyttävät maan reaktiovoimat videokuvan päällä sekä reaaliajassa sieppausmoodissa että toiston aikana. Jokaisen videokuvan (kamerakulman) oikeassa alakulmassa on grafiikka, joka näyttää vektoreiden koordinaatit 3D-avaruudessa.
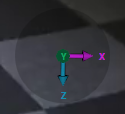
Koordinaattiesitys vaihtelee kamerakulman mukaan.
Koordinaattigrafiikka osoittaa, että Z-akseli on pystysuora ja Y ja X ovat vaakasuoria, käyttäen samoja värejä kuin voimagraafeissamme.

Voimavektoreiden suuruus vastaa todellisuutta, eli (oikein kalibroituna) yhden metrin korkuinen vektori vastaa 1000 Newtonia.
Voimavektorit – Kalibrointi
Kalibrointi on välttämätön voimavektoreiden käyttämiseksi, sillä sen avulla tunnistetaan missä lauta sijaitsee videokuvassa. Kalibrointi on tehtävä vain kerran kutakin kamerakulmaa varten. Jos kamera(t) tai lauta(t) muuttavat fyysistä sijaintiaan, uusi kalibrointi on tarpeen.
Huomioithan, että vanhojen nauhoitusten osalta kalibrointi on tehtävä erikseen kullekin nauhoitukselle – se ei tapahdu takautuvasti, koska meillä ei ole mahdollisuutta tietää, missä lauta sijaitsee videokuvassa. On tärkeää tehdä kalibrointi sieppausmoodissa, jotta se tallentuu automaattisesti jokaisen uuden nauhoituksen yhteydessä.
Versiossa 10.2 ja uudemmissa voimavektoreiden kalibrointi löytyy kohdasta “Data Visuals”
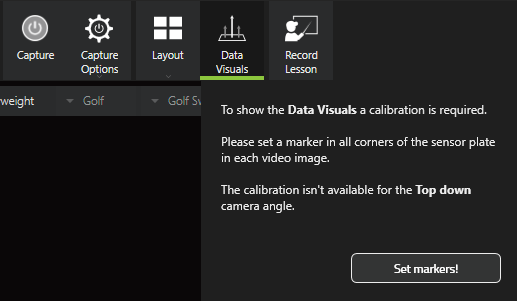
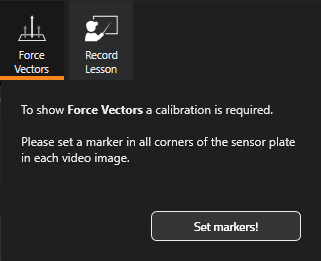
Aloita kalibrointiprosessi napsauttamalla “Set markers!”.
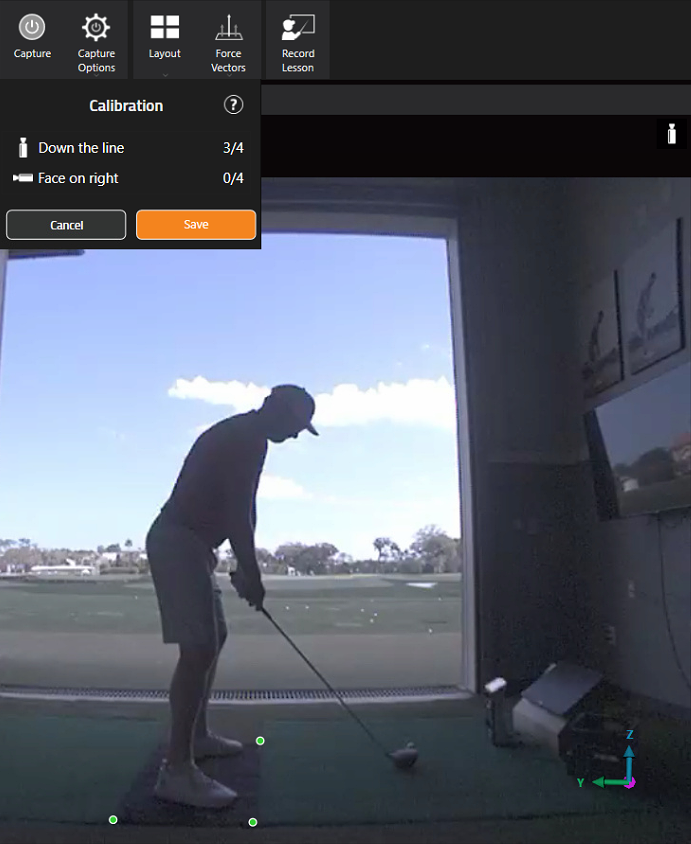
Aseta merkitsijät napsauttamalla jokaista laudan kulmapisteen. Kaksoislautojen tapauksessa napsauta molempien lautojen kahta ulommaista kulmapisteen.
Toista prosessi muille kamerakulmille.
Jos teet virheen, jätä se huomiotta ja suorita prosessi loppuun kyseiselle kulmalle, jonka jälkeen aloita alusta napsauttamalla kulmapisteen.
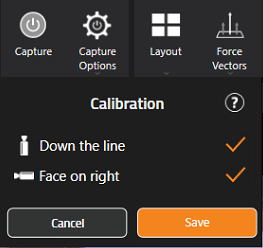
Napsauta “Save” kun olet valmis.
Voimavektorit – Asetukset
Tästä pudotusvalikosta pääset kaikkiin voimavektoreihin liittyviin asetuksiin.
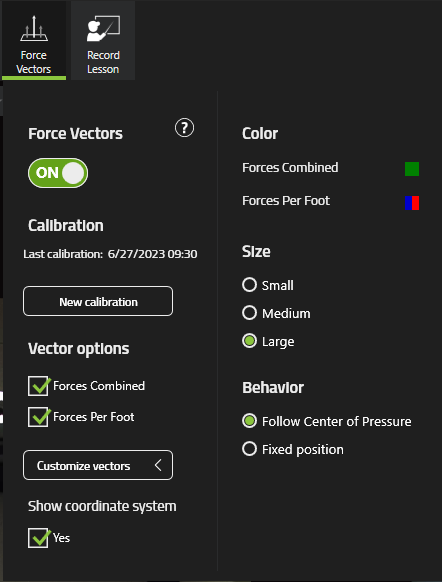
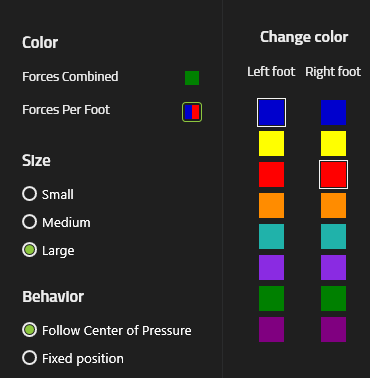
Vaihda väri napsauttamalla värin “kuvaketta”.
Esimerkki eri värien valinnasta:
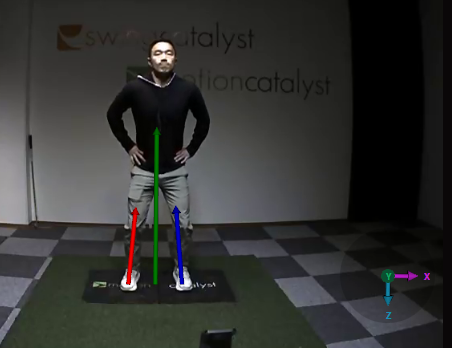
Vianmääritys
Voimavektorit lähtevät samasta kohdasta, vaikka kalibrointi on oikein ja minulla on kaksois-voimaanturi / Dual Motion Plate -asento.
Jos kamerakulma on virheellinen, se saattaa olla syynä tähän.
Kuvittele, että katsot alla olevaa kuvaa X-nuolen suuntaan (katso violetti nuoli kuvan oikeassa alakulmassa).
Kaikki voimavektorit renderöidään samalle syvyydelle. Sivulta katsottuna ne näyttävät lähtevän samasta kohdasta.
Huomaa, että jo luotujen nauhoitusten kamerakulmaa ei voi muuttaa jälkikäteen. On tärkeää varmistaa, että kamerakulma on oikein ennen nauhoittamista.
Viimeksi päivitetty: 2023-12-19 | Näytä virallisella tukisivustolla