Swing Catalyst Liikkeenjäljitys-asetukset
Johdanto
Tässä artikkelissa kuvataan, miten Liikkeenjäljitys-toiminto asetetaan ja konfiguroidaan Swing Catalystissa. Tämä ominaisuus ei välttämättä ole saatavilla kaikille lisenssityypeille. Lisätietoja löydät Liikkeenjäljityksen UKK-sivulta .
Vaatimukset
- Komponentit on asennettava komponenttihakemistoon.
Tietokoneesi on täytettävä PC-spesifikaatiosuosituksemme. Tärkein vaatimus on, että näytönohjain täyttää suosituksemme.
Konfigurointi
Liikkeenjäljityksen asetukset löytyvät pääasiallisesta Asetukset-valikosta kohdasta “Video & Sieppaus”. Täältä voit valita tai vaihtaa suorituspalveluntarjoajia ja eräkokoa.
Suosittelemme eräkokoa 12–24 riippuen siitä, kuinka monta aktiivista/käytössä olevaa kameraa sinulla on.
Suositellut suorituspalveluntarjoajat
NVIDIA
NVIDIA RTX 3060 tai uudempi GPU -> TensorRT
Jos TensorRT ei toimi, kokeile CUDA:a
Muut näytönohjaimet
- DirectML
Oletusarvona on DirectML, koska se on yhteensopivin vaihtoehto. Se on valitettavasti myös hitain.
Vertailutestauksen aikana olemme havainneet TensorRT:n olevan suorituskykyisin suorituspalveluntarjoajista.
TensorRT on keskimäärin (35–45 % nopeampi kuin DirectML, 20–25 % nopeampi kuin CUDA)
CUDA tarjoaa kohtalaisen parannuksen DirectML:ään verrattuna (keskimäärin 10–12 %)
CUDA käyttää huomattavasti enemmän GPU-muistia (VRAM) kuin TensorRT. Kokeile pienentää eräkokoa, jos käytät CUDA:a
Komponenttien lataaminen
Jos valitset komponentin, jota ei ole vielä asennettu, sinua pyydetään lataamaan se.
TensorRT:n tai CUDA:n käyttämistä varten sinun on ensin ladattava komponentit.
note: Tämä ominaisuus on saatavilla vain versiossa 25.2.
Suositeltu eräkoko
Testauksen perusteella suuremmat eräkoot tuottavat paremman suorituskyvyn. Suosittelemme eräkokoa 16–24 tyypilliselle 2–3 kameran asetukselle. Jos käytät samanaikaisesti muita ohjelmistoja, jotka tarvitsevat grafiikkaresursseja, pienempi eräkoko voi olla hyödyllinen. Paras eräkoko riippuu viime kädessä työnkulustasi ja siitä, mitä ohjelmia sinulla on käynnissä Swing Catalystin lisäksi.
Lisäasetukset
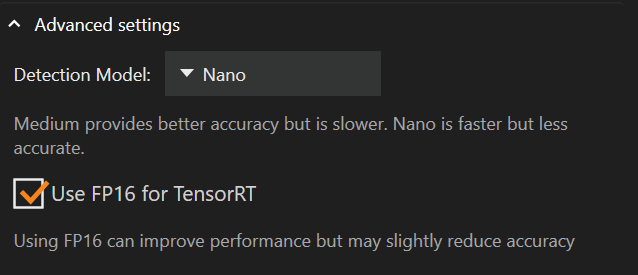
Suorituspalveluntarjoaja-asetusten alapuolella ovat lisäasetukset, joissa voit vaihtaa tunnistusmallia tai ottaa käyttöön “FP16”-asetuksen.
Tunnistusmallin vaihtaminen Mediumista Nanoon voi vähentää näytönohjaimen muistinkäyttöä ja parantaa suorituskykyä tarkkuuden kustannuksella.
Jos sinulla on vaikeuksia saada hyvä tunnistus, kokeile vaihtaa malliksi Medium, käynnistä Swing Catalyst uudelleen ja yritä uudelleen.
Oletustunnistusmalli on Nano
“FP16 for TensorRT” ei ole oletusarvoisesti valittuna
FP16
FP16:n käyttäminen voi vähentää muistinkäyttöä ja parantaa suorituskykyä (tarkkuuden kustannuksella).
Testauksen aikana olemme havainneet, että FP16 voi parantaa suorituskykyä 20–35 %.
Se saattaa myös tuottaa epäjohdonmukaisempia tuloksia nauhoitusten välillä kuin oletusarvoinen FP32. Sitä voi olla hyödyllistä kokeilla, jos sinulla on suorituskykyongelmia tai muisti loppuu kesken.
Suorituskykyvertailut
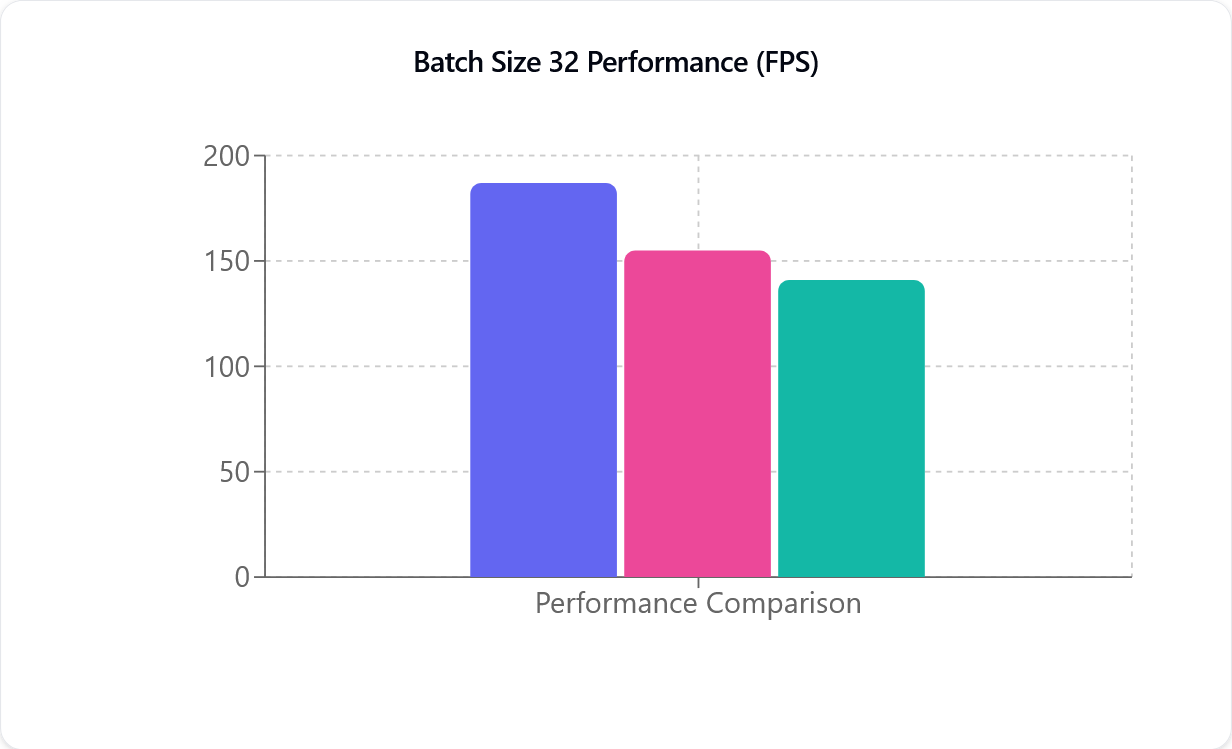
TensorRT (violetti), CUDA (pinkki) ja DirectML (vihreä), vasemmalta oikealle. Y-akseli (FPS) kuvaa, kuinka monta kuvaa sekunnissa liikkeenjäljitysmalli pystyy käsittelemään, eikä se liity suoraan kamerasi kuvataajuuteen.
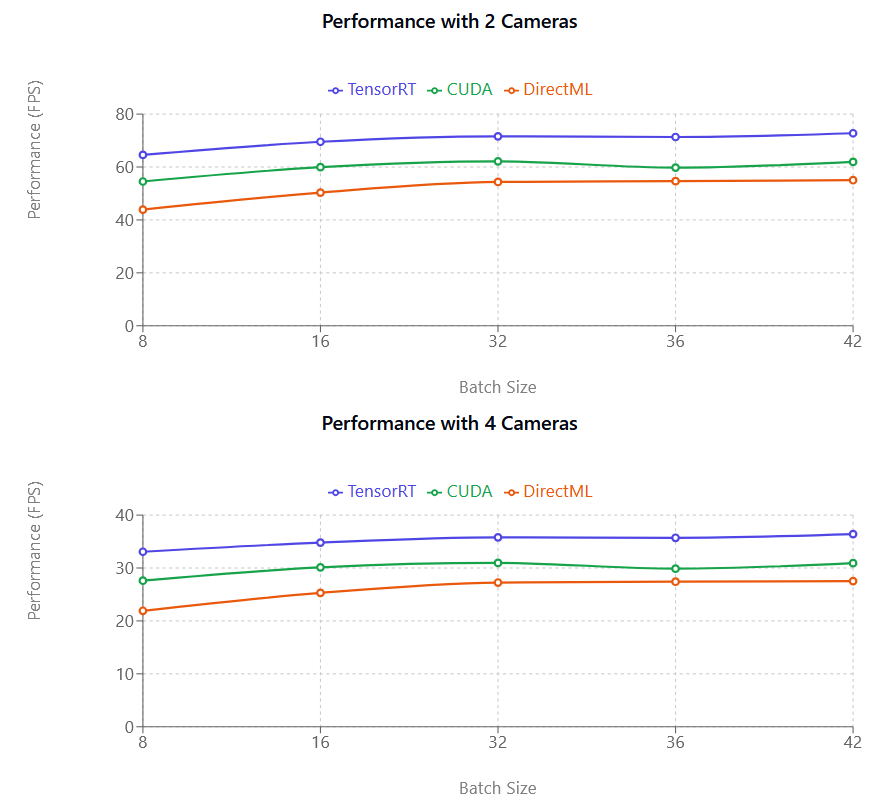
Suorituskykymittari (FPS) kertoo, kuinka monta kuvaa sekunnissa käsitellään – mitä suurempi luku, sitä nopeammin käsittely tapahtuu. Kuten yllä olevasta kuvasta näkyy, sekä CUDA että TensorRT ovat lähes lineaarisia. Esimerkiksi siirryttäessä yhdestä kamerasta kahteen suorituskyky laskee lähes puoleen. Tämä suorituskyvyn heikkeneminen on vähemmän merkittävä uudemmilla NVIDIA-näytönohjaimilla.
Viimeksi päivitetty: 2025-05-16 | Näytä virallisella tukisivustolla