การติดตั้งและการตั้งค่า Dual Motion Plate
สำหรับเนื้อหาการติดตั้งเชิงลึกเพิ่มเติม โปรดดูที่ไฟล์ pdf ที่แนบมา
การติดตั้ง
สำหรับข้อมูลการติดตั้งทางกายภาพ โปรดดูที่ไฟล์แนบคู่มือการติดตั้ง PDF
ดู PDF คู่มือการติดตั้ง สำหรับการเตรียมห้องเพื่อการติดตั้ง
ดู PDF คู่มือเริ่มต้นใช้งาน สำหรับการตั้งค่า Motion Plate เพื่อใช้งาน
ข้อกำหนด:
ซอฟต์แวร์จะติดตั้ง driver สำหรับแผ่นวัดแรงและแผ่นวัดสมดุลโดยอัตโนมัติ (ยกเว้นไฟล์การปรับเทียบ) โดยปกติไม่จำเป็นต้องติดตั้งด้วยตนเอง
ติดตั้ง driver Bertec CDM แล้ว
ติดตั้ง driver MeasureX แล้ว คลิกเพื่อดูรายละเอียดการติดตั้ง
- ฮาร์ดแวร์ Dual Motion Plate
ใช้ได้กับ:
- MotionCatalyst & SwingCatalyst
นอกเหนือจากคู่มือเริ่มต้นใช้งาน ขอให้ทำความคุ้นเคยกับการทดสอบการปรับเทียบด้านล่างด้วย
การเชื่อมต่อแผ่น
สำหรับการตั้งค่าแผ่นคู่จะมีสายเคเบิลทั้งหมด 4 เส้น ในหลายกรณีอาจเป็นการดีที่จะใช้ USB hub แบบมีไฟเลี้ยงในการเชื่อมต่ออุปกรณ์ เพื่อไม่ให้ใช้พอร์ต USB ที่มีอยู่บนคอมพิวเตอร์ทั้งหมด
ขั้นตอนการเชื่อมต่อ
เชื่อมต่อสาย USB Mini B สองเส้นเข้ากับแผ่นวัดสมดุลทั้งสอง
เชื่อมต่อสาย USB-B (หัวต่อที่ใหญ่กว่า USB Mini B) สองเส้นเข้ากับแผ่นวัดแรง
เชื่อมต่อสาย 4 เส้นจากแผ่นเข้ากับคอมพิวเตอร์
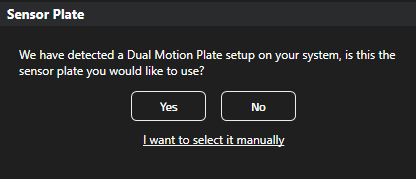
หากระบบไม่ตรวจพบการกำหนดค่าแผ่นโดยอัตโนมัติ ให้ลองถอดและเสียบสายเคเบิลบางเส้นใหม่ แล้วรีสตาร์ทซอฟต์แวร์
คลิก “Yes” เพื่อดำเนินการต่อ
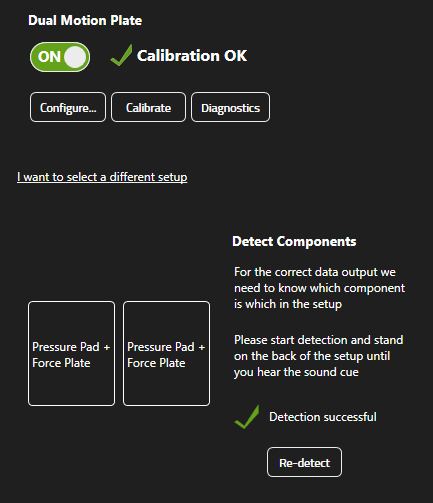
เมื่อซอฟต์แวร์ระบุแผ่นทั้งหมดที่ประกอบกันเป็น Dual Motion Plate ได้สำเร็จแล้ว ก็ถึงเวลาปรับเทียบแผ่น
ตรวจสอบให้แน่ใจว่าไม่มีผู้ใดยืนอยู่บนแผ่น และแผ่นปลอดจากพื้นหญ้าหรืออุปกรณ์โดยรอบ
คลิก “Calibrate”
ซึ่งจะเป็นการรีเซ็ตค่าศูนย์ของแผ่นวัดแรง หากการปรับเทียบล้มเหลว โปรดดูหัวข้อการแก้ไขปัญหา ของเรา
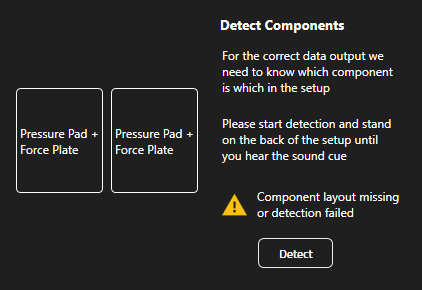
การตรวจจับส่วนประกอบ
เพื่อให้ทราบว่าแผ่นใดอยู่ด้านหน้าหรืออยู่ทางขวา คุณจะต้องดำเนินการตามขั้นตอนนี้
คลิก “Detect” และทำตามคำแนะนำบนหน้าจอ
การทดสอบการปรับเทียบ
การปรับเทียบมีสองประเภท:
ค่าระดับศูนย์สำหรับแผ่นวัดแรง
ไฟล์การปรับเทียบสำหรับแผ่นวัดความดัน / แผ่นวัดสมดุล
การทดสอบนี้มีไว้เฉพาะสำหรับส่วนแผ่นวัดแรงของ Motion Plate เพื่อยืนยันว่าติดตั้งอย่างถูกต้อง
การตรวจสอบให้แน่ใจว่ามีการปรับเทียบที่ดีนั้นมีความสำคัญสำหรับข้อมูลที่แม่นยำ เราแนะนำให้ปรับเทียบและทดสอบการปรับเทียบก่อนทุกเซสชันของชุดการบันทึก
คลิกปุ่ม “Calibrate” ในเมนูการตั้งค่า - Hardware - แผ่นเซนเซอร์
คลิกปุ่ม “Configure” ที่อยู่ถัดจากนั้น แล้วคลิกปุ่ม “Play” เพื่อดูตัวอย่างข้อมูลแรงและข้อมูลความดันแบบสด
ใช้ก้านอ้อหรือส้นเท้ากดลงที่มุมอ้างอิงใดมุมหนึ่งของแผ่น จากนั้นตรวจสอบว่าข้อมูลความดัน (แผนที่ความร้อนสี) สอดคล้องกับข้อมูลแรง (วงกลม CoP รวม)
หากไม่สอดคล้องกัน อาจเป็นเพราะแผ่นหนึ่งหรือมากกว่านั้นจำเป็นต้องหมุน ดู “วิธีเปลี่ยนการหมุน ”
เริ่มเซสชัน จากนั้นจับภาพการบันทึกโดยไม่มีผู้ใดอยู่บนแผ่น เปิดการบันทึกและตรวจสอบว่าค่าแรงอยู่ภายในช่วง 10 Newton จากศูนย์
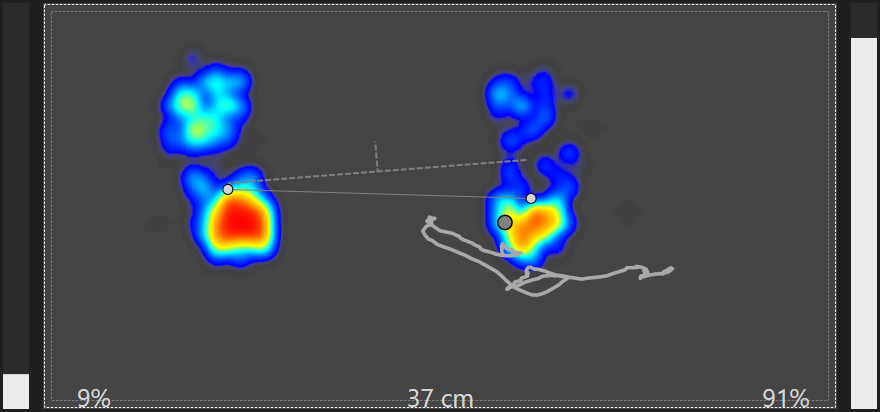
ตัวอย่างจุดความดันที่สอดคล้องกับจุด จุดศูนย์กลางความกดดัน:
เราต้องการให้ข้อมูลความดัน / ข้อมูลท่ายืนอ่านค่าจากนิ้วเท้าถึงส้นเท้า เพื่อให้ทำเช่นนั้นได้ ข้อมูลความดันจำเป็นต้องหมุน 180 องศา เพื่อให้เท้าซ้ายปรากฏบนแผ่นซ้าย (ที่ส่วน “swing” ของโลโก้ SwingCatalyst) และเท้าขวาปรากฏบนแผ่นขวา
การแก้ไขปัญหา
ข้อมูลความดันและข้อมูลแรงไม่สอดคล้องกัน หรือการปรับเทียบล้มเหลว
หากจุด CoP ไม่ตรงกับจุดความดัน แผ่นมักจะไม่ระนาบหรือมีบางสิ่งกดทับอยู่และขัดขวางการเคลื่อนไหวอย่างอิสระ
คลิกปุ่ม “Calibrate” อีกครั้ง จากนั้นทำการทดสอบการปรับเทียบซ้ำ
หากยังคงผิดพลาดอยู่ ให้ปรับขาปรับระดับของแผ่นวัดแรงขณะกดลงที่มุมตรงข้าม โดยเริ่มจากการย่อให้สั้นลงก่อน แล้วจึงยืดออกจนถึงจุดที่สัมผัสพื้นและรู้สึกว่ามีแรงต้านเล็กน้อย
ยืนยันว่าขาทั้งสี่สัมผัสพื้นอย่างมั่นคงโดยกดลงที่มุมต่าง ๆ
ตรวจสอบให้แน่ใจว่าไม่มีพื้นหญ้าหรือสิ่งที่คล้ายกันกดทับแผ่น
ทำการทดสอบการปรับเทียบซ้ำ
ด้านล่างนี้คือตัวอย่างของการกำหนดค่าที่ไม่ถูกต้อง หวังว่าตัวอย่างเหล่านี้จะช่วยให้เข้าใจและแก้ไขปัญหาประเภทนี้ได้
ข้อมูลความดัน / รอยเท้าหายไปบนแผ่นหนึ่ง
ตรวจสอบการเชื่อมต่อกับแผ่นวัดสมดุลแต่ละแผ่น ลองถอดแผ่นออกแล้วเชื่อมต่อใหม่
รีสตาร์ทซอฟต์แวร์
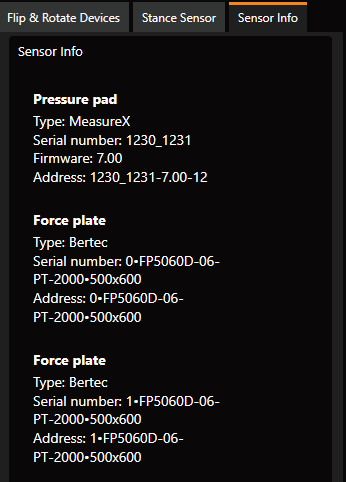
ตรวจสอบว่า SwingCatalyst รับรู้แผ่นทั้งสอง ใน “Hardware Settings” -> “Configure” -> “Sensor Info” ควรมีหมายเลขซีเรียลสองหมายเลข เช่น: 1230_1231 หากแสดงเพียงหมายเลขเดียว แผ่นที่สองอาจไม่ได้รับการรับรู้โดย SwingCatalyst
ตรวจสอบ Windows Device Manager ควรมีสองรายการภายใต้ “Ports & COM” ที่ชื่อว่า “MeasureX Pressure Controller” หากคุณไม่เห็นรายการเหล่านี้ อาจบ่งชี้ว่ามีปัญหาการเชื่อมต่อทางกายภาพ
ตัวอย่างการกำหนดค่าที่ไม่ถูกต้อง
ข้อมูลความดันกลับหัว

การกำหนดค่าเช่นนี้สามารถระบุได้โดยการยืนบนแผ่นและเอนตัวไปข้างหน้าหรือข้างหลัง
หากการเคลื่อนที่ของ CoP ตรงข้ามกับความดัน หมายความว่าแรงหรือความดันจำเป็นต้องหมุน 180 องศา
ความดันกลับหัวและแรงมีการหมุนที่ผิด

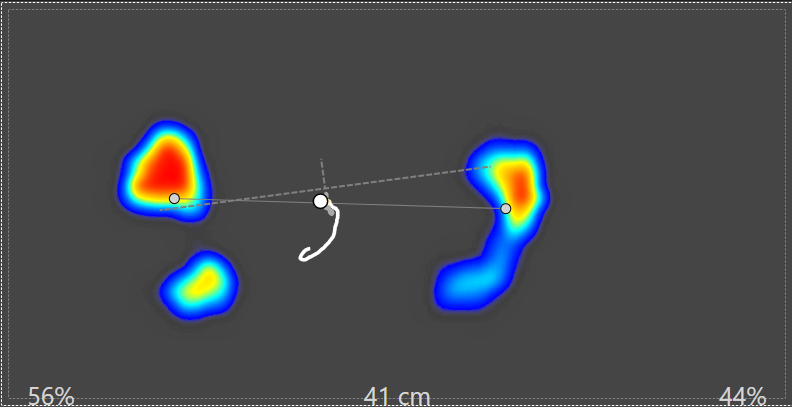
ตามตรรกะที่อธิบายในการทดสอบการปรับเทียบข้างต้น ในตัวอย่างนี้มีหลายสิ่งที่ผิดพลาด:
รอยเท้า (ข้อมูลความดัน หรือที่เรียกว่าข้อมูลท่ายืนใน SwingCatalyst Settings) “กลับหัว”
จุด CoP (จุดสีขาวถัดจาก “S” ในโลโก้ “Swing Catalyst” ในพื้นหลัง) ไม่สอดคล้องกับรอยเท้า
จุด CoP ไม่ปรากฏบนแผ่นเดียวกับรอยเท้า
เพื่อแก้ไขปัญหานี้ เราต้องหมุนข้อมูลความดัน / ข้อมูลท่ายืนก่อนเพื่อให้เท้าซ้ายปรากฏทางด้านซ้าย จากนั้นจึงหมุนข้อมูลแรงจนกว่าจะตรงกับรอยเท้า
สำหรับแผ่นคู่ สิ่งสำคัญคือต้องใช้ตรรกะการทดสอบการปรับเทียบกับแต่ละแผ่นทีละแผ่น
ระหว่างเฟสการตรวจจับแผ่นคู่มีการเหยียบแผ่นผิด
ในตัวอย่างนี้มีการเหยียบแผ่นผิดระหว่างเฟส “detect components” เมื่อเป็นเช่นนี้ คุณจะเห็นว่าข้อมูลความดันและข้อมูลแรงไม่สอดคล้องกันอย่างถูกต้อง และในกรณีนี้จุด CoP อยู่นอกรอยเท้า ซึ่งโดยปกติไม่ควรเป็นเช่นนั้น
เพื่อแก้ไขปัญหานี้ ให้ลองคลิก “detect components” อีกครั้ง แต่เหยียบแผ่นขวา / แผ่นด้านหลัง เมื่อทำเช่นนี้แล้ว ข้อมูลควรเปลี่ยนให้ดูคล้ายกับภาพหน้าจอด้านล่างมากขึ้น
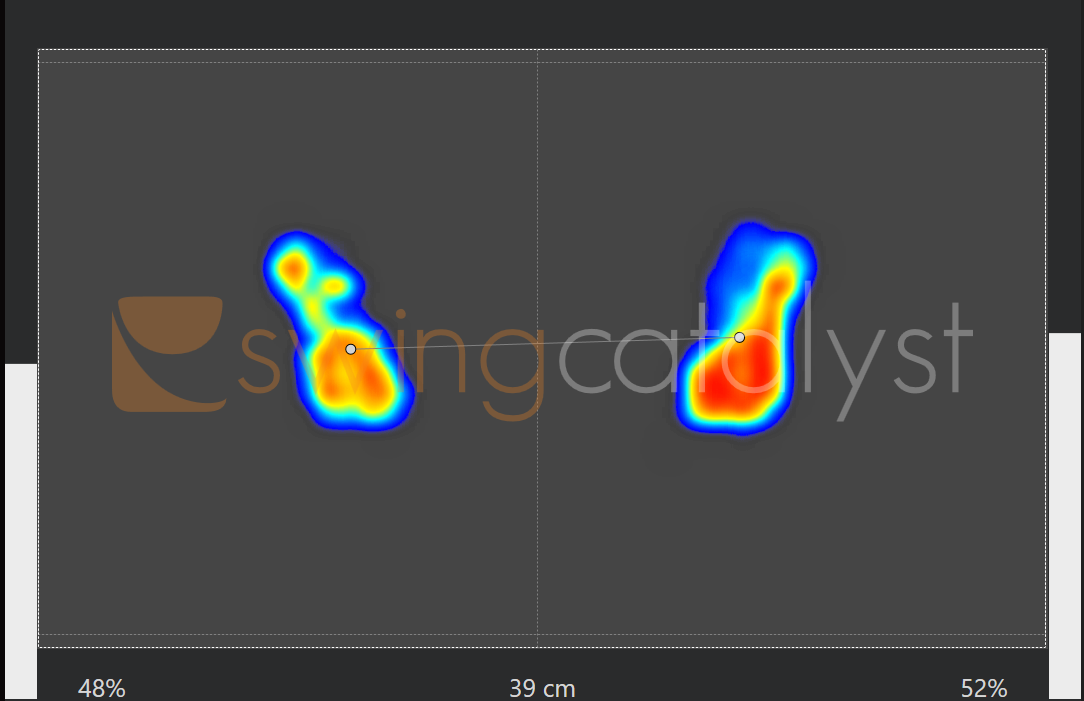
นี่คือข้อมูลเดียวกับข้างต้น แต่ตรวจจับแผ่นที่ถูกต้องแล้ว:
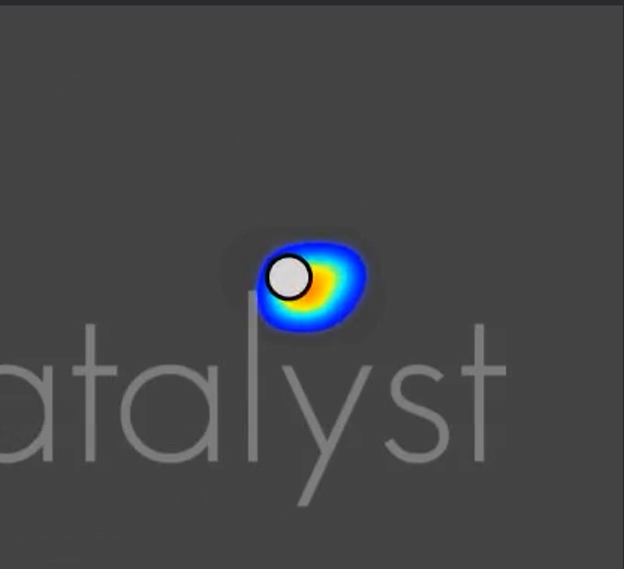
ข้อมูลความดันดูถูกต้องแต่ CoP ผิด
นี่คือตัวอย่างจาก Single Motion Plate ที่การหมุนข้อมูลแรงผิด 180 องศา
คุณสังเกตได้จากข้อมูลความดันที่มีทิศทางถูกต้อง (ส้นเท้าอยู่ด้านล่างของหน้าจอ)
เพื่อแก้ไขปัญหาเช่นนี้ โปรดอ้างอิงการทดสอบการปรับเทียบข้างต้นและทำตามขั้นตอน สำหรับแผ่นคู่จำเป็นต้องทำสำหรับแต่ละแผ่น
วิธีเปลี่ยนการหมุน
แทนที่จะหมุนแผ่นทางกายภาพ สามารถทำได้ในซอฟต์แวร์
หากต้องการหมุนแผ่นเซนเซอร์ ไปที่ Settings -> Hardware แล้วคลิก Configure
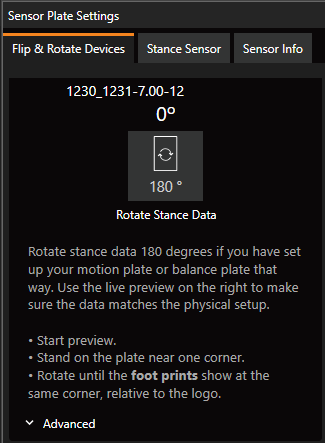
ใน Sensor Plate Settings ตรวจสอบให้แน่ใจว่าเลือกแท็บ “Flip & Rotate Devices” อยู่
หากต้องการหมุนข้อมูลความดัน คลิก “Rotate Stance Data”
หากต้องการหมุนข้อมูลแรง คลิก “Rotate Force Data”
โปรดดูภาพการแก้ไขปัญหาบางส่วนด้านล่างเนื่องจากภาพเหล่านั้นแสดงให้เห็นการกำหนดค่าที่ไม่ถูกต้อง
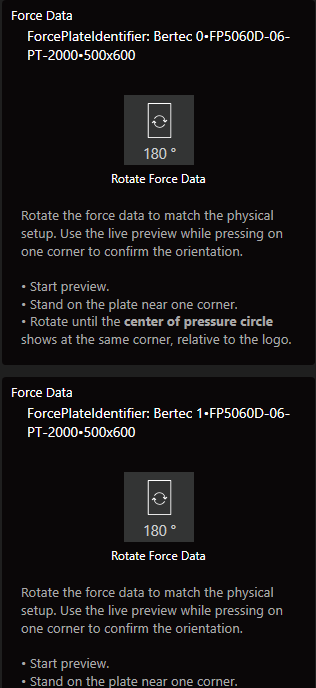
สำหรับการตั้งค่าแผ่นคู่ คุณควรเห็นรายการข้อมูลแรงสองรายการในรายการ ดังนั้นโปรดตรวจสอบให้แน่ใจว่าหมุนแผ่นวัดแรงทั้งสองในซอฟต์แวร์
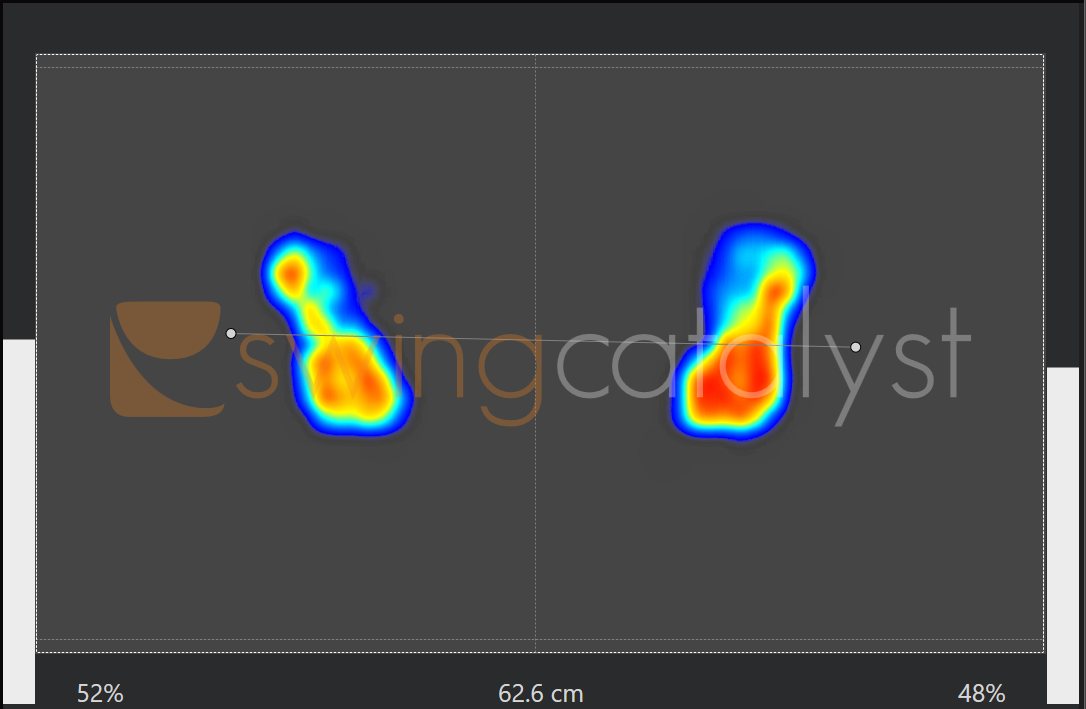
ข้อมูลที่ดีเทียบกับข้อมูลที่ไม่ดี
นี่คือตัวอย่างของข้อมูลที่ดี มีสัญญาณรบกวนน้อยมากในข้อมูลหรือสัญญาณบ่งชี้ใด ๆ ว่ามีบางสิ่งขัดขวางการเคลื่อนไหวของแผ่น
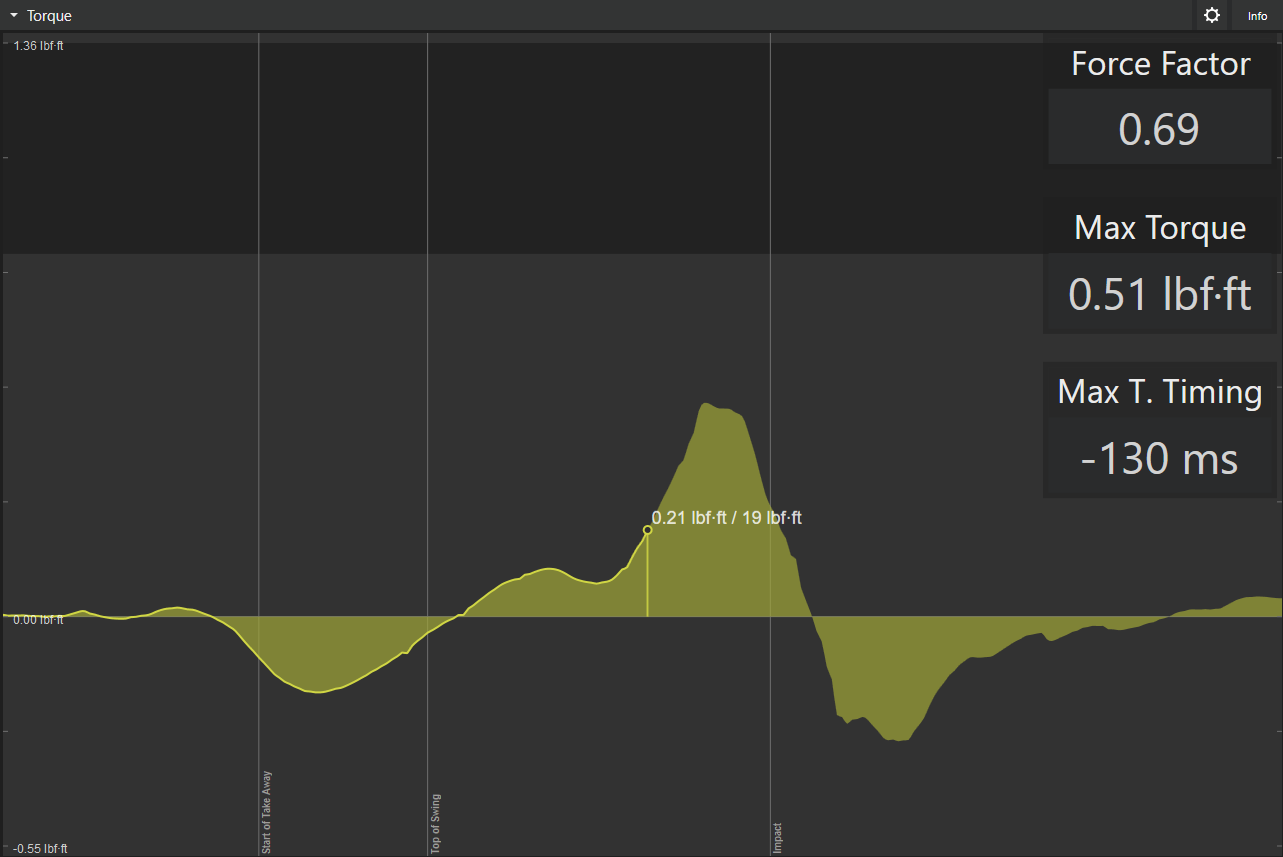
หากคุณมีข้อมูลที่มีสัญญาณรบกวน หรือค่าที่ต่ำมากบนกราฟ นี่
ตัวอย่างของการตั้งค่าศูนย์ที่ไม่ดี:
สัญญาณรบกวนจากแหล่งจ่ายไฟหรือการต่อกราวด์ที่ไม่ดีอาจส่งผลให้เกิดสัญญาณรบกวนคล้ายกับที่เห็นข้างต้น สำหรับรายละเอียดเพิ่มเติม โปรดดู: force-plate-troubleshooting.md
ไฟล์แนบ
อัปเดตล่าสุด: 2024-03-05 | ดูบนเว็บไซต์สนับสนุนอย่างเป็นทางการ